- Wavelet
- Wavelet
Main | Mathematical Methods | CRAVA User Guide | Download
Inversion | Background model | Wavelet | Prior Correlations | Optimal Well Locations | Facies Probabilities | Rock Physics
The implemented wavelet estimation uses the approach of spectral division, see White (1984). In this approach an estimate of the cross-correlation between data and reflection coefficients, and an estimate of the auto-correlation of reflection coefficients are used to estimate the wavelet. The methodology requires that the reflection coefficients are known, thus wavelets are estimated at well locations. The cross-correlation between data and reflection coefficients is found by convolving the data with the reflection coefficients, and tapering the result. The auto-correlation of the reflection coefficients are found similarly by convolving the reflection coefficients with themselves and then applying a taper to the result. The tapering is performed in order to avoid spurious correlations at large lags.
Using the standard convolutional relation for seismic data,
![]()
where d is the seismic amplitude data, w is the wavelet, c the reflection coefficients, and e is the noise. We see that convolving the data with reflection-coefficients, transforming to the Fourier domain, and take the expectation we get
![]()
Note that the convolution has disappeared, and the equation can be solved for each frequency w. We recognise the left hand side as the spectre of the cross-correlation between data and reflection coefficients. And the right hand side as the wavelet multiplied with spectre of the auto-correlation of the reflection coefficients. This can be obtained by dividing the spectre of the cross-correlation with the spectre of the auto-correlation. Tapering of the estimated cross-correlation and auto-correlation is required in order to stabilise the estimate. In Crava a Papoulis taper is used. Tapering is equivalent to a local smoothing in the frequency domain, thus the resulting wavelet estimate will behave smoothly in Fourier domain. We find the optimal vertical shift for each well. The global wavelet is then found by taking the arithmetic average of the zero-phase wavelets, weighted by the number of samples used from each well.
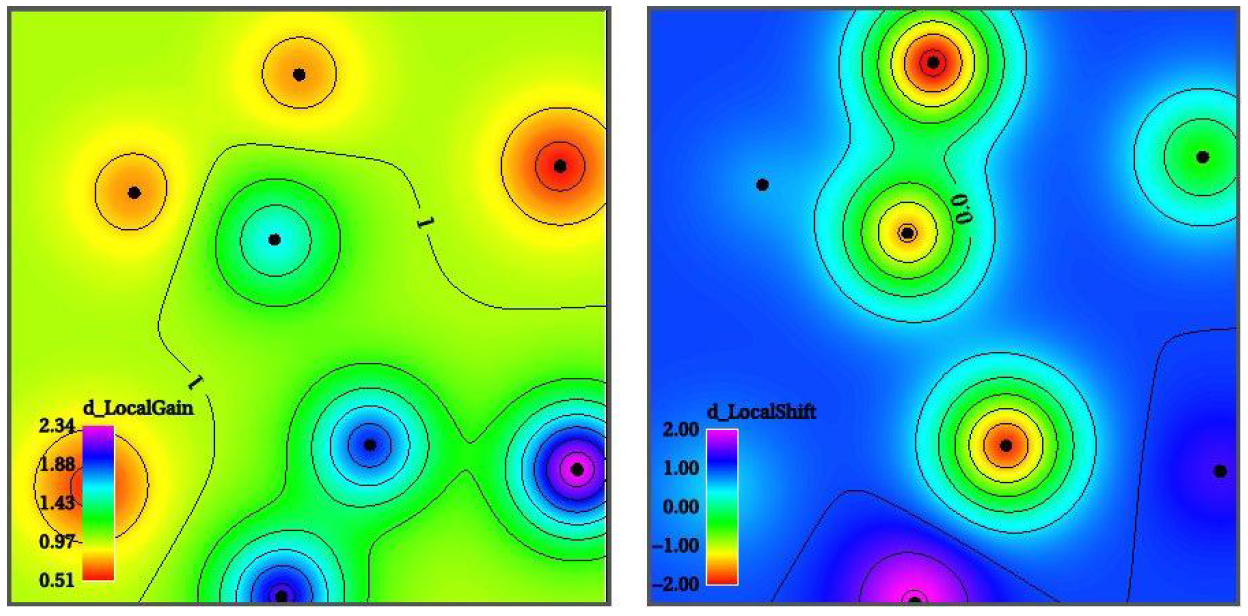
When using local wavelets, we find the optimal shift and/or scale of the global wavelet at each well location. Optimal here means minimising the noise energy. We then use kriging to interpolate this between wells, with a shift of 0 and a scale of 1 as the mean level outside the well control area. This is illustrated in Figure 1.
Local noise is estimated using the local noise energies from above. We always use local shift when estimating the noise, but only use local scale if it is used in the inversion. If local scale is used, the noise is divided by this. A noise scaling factor is then computed in each well, and kriged as above.
White, R. E. (1984). Signal and noise estimation from seismic reflection data using spectral coherence methods.
Proceedings of the IEEE, 72:1340–1356. 38
 How to get to NR
How to get to NR Share on social media
Share on social media Privacy policy
Privacy policy